Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Short description of portfolio item number 1
Short description of portfolio item number 2
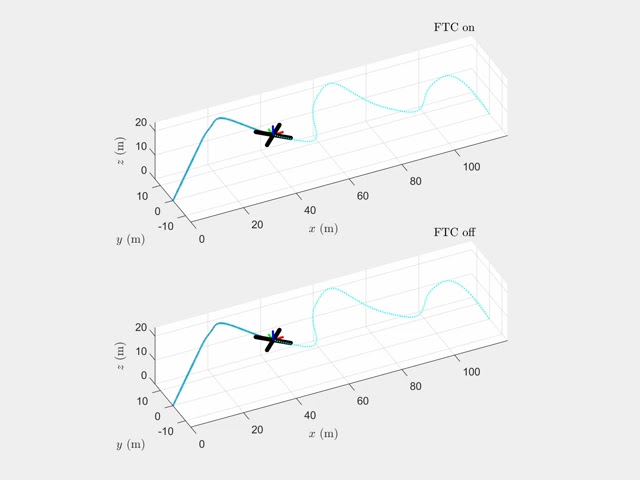
Undergraduate Research, National Cheng Kung University (NCKU), Intelligent Embedded Control (IEC) Lab, Department of Aeronautics and Astronautics, 2018
The objective is to design a flight control algorithm for a quadrotor and study further how to recover control in the presence of single rotor loss.
Graduate Course Project, KAUST, EE372-Dynamic Programming and Optimal Control, 2021
This work aims to develop a nonlinear model predictive controller to achieve trajectory tracking for a quadrotor subject to input constraints.
Graduate Course Project, University of Maryland, ENAE646-Advanced Dynamics, 2023
This goal of this project is to analyze the motion of a torque-free rigid body and determine its trajectory in the inertial frame.
Master Thesis Research, KAUST, RISC Lab, Department of Mechanical Engineering, 2023
This work proposed a triple-integral flight control framework for a zero-gravity flight using a proof-mass-tracking approach. A triple-integral control strategy is adopted to overcome unknown, quadratically increasing drag. Furthermore, to avoid the non-minimum phase characteristics of aircraft longitudinal dynamics (see below), the position deviation from the inertial reference is redefined such that the closed-loop system is minimum phase.
Graduate Course Project, University of Maryland, ENAE788M-Hands on Aerial Robotics, 2024
This project aims to detect AprilTag positions and use a planner to generate the drone’s trajectory. We use multiple AprilTags to provide waypoints for the drone, leveraging the tracking camera’s video feed for detection. The Fast-Planner is used to plan a safe, kinodynamically feasible trajectory based on these waypoints. The flight tests were done with a Modal AI VOXL2 drone at UMD Brin Family Aerial Robotics Lab.
Published in Applied Science, 2020
The objective is to design a flight control algorithm for a quadrotor and study further how to recover control in the presence of single rotor loss. The error transformation and reconfiguration techniques combined with sacrificing yaw control are applied to realize fault-tolerant control under actuator failures. The input saturation is not considered in our case.
Recommended citation: Lien, Y. H., Peng, C. C., & **Chen, Y. H. (2020)**. Adaptive observer-based fault detection and fault-tolerant control of quadrotors under rotor failure conditions. Applied Sciences, 10(10), 3503. https://www.mdpi.com/2076-3417/10/10/3503
Published in AIAA SCITECH 2023, 2023
Parabolic flights are one way to simulate microgravity on Earth, which can be achieved by making aircraft follow specific flight trajectories. This work describes a kinematic and dynamic analysis of general partial gravity cases and develops a flight control framework for a zero-gravity flight using a proof-mass-tracking approach. A triple-integral control structure is adopted to overcome unknown, quadratically increasing drag. Furthermore, to avoid the non-minimum phase characteristics of aircraft longitudinal dynamics, the position deviation from the inertial reference is redefined such that the closed-loop system is minimum phase.
Recommended citation: Chen, Y. H., & Feron, E. (2023). Design of Longitudinal Control for Reduced-Gravity Atmospheric Flights. In AIAA SCITECH 2023 Forum (p. 0218). https://arc.aiaa.org/doi/epdf/10.2514/6.2023-0218
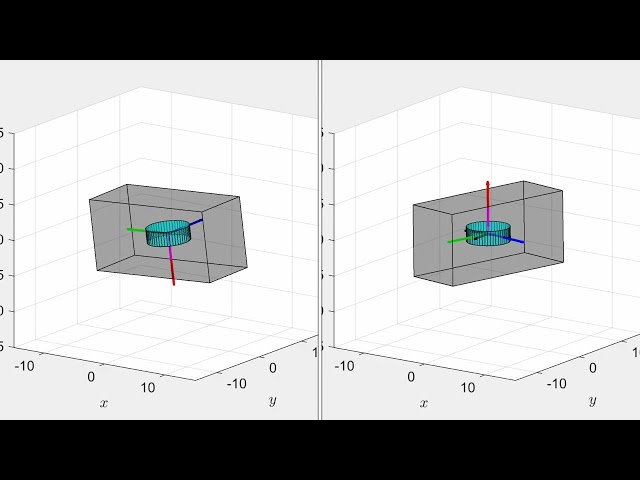
Published in IEEE CDC 2025, 2025
Safely navigating around obstacles while respecting the dynamics, control, and geometry of the underlying system is a key challenge in robotics. In this paper, we propose an optimization-defined CBF that directly considers the exact Signed Distance Function (SDF) between a polytopic robot and polytopic obstacles.
Recommended citation: Chen, Yi-Hsuan, et al. "Control Barrier Functions via Minkowski Operations for Safe Navigation among Polytopic Sets." arXiv preprint arXiv:2504.00364 (2025). https://arxiv.org/pdf/2504.00364
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate Research, National Cheng Kung Univeristy (NCKU), Intelligent Embedded Control (IEC) Lab, Department of Aeronautics and Astronautics, 2018
Graduate Course Project, KAUST, EE372-Dynamic Programming and Optimal Control, 2021
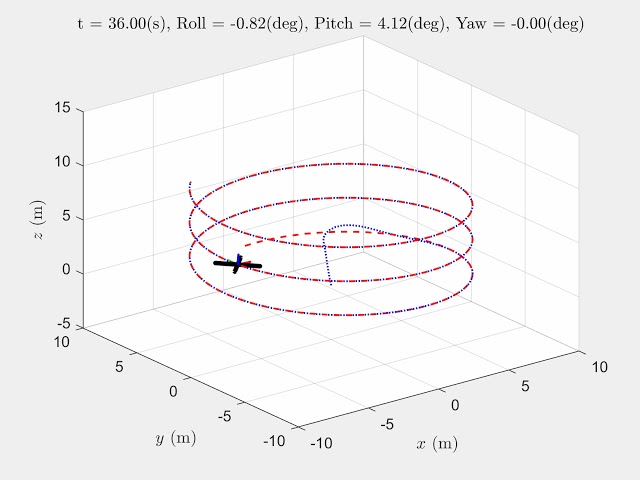
Graduate Course Project, University of Maryland, ENAE646-Advanced Dynamics, 2023
Master Thesis Research, KAUST, RISC Lab, Department of Mechanical Engineering, 2023
