
Fault Tolerant Control of a quadrotor under actuator failures
Undergraduate Research, National Cheng Kung Univeristy (NCKU), Intelligent Embedded Control (IEC) Lab, Department of Aeronautics and Astronautics, 2018
The objective is to design a flight control algorithm for a quadrotor and study further how to recover control in the presence of single rotor loss.
Advisor: Dr. Chao-Chung Peng
The error transformation and reconfiguration techniques combined with sacrificing yaw control are applied to realize fault-tolerant control under actuator failures. The input saturation is not considered in our case. This project is mainly hosted by Prof. Chao-Chung Peng, the director of Intelligence Embedded Control Laboratory (IEC-Lab) in Department of Aeronautics and Astronautics, National Cheng Kung University, Taiwan. It was also a part of collaboration with the Industrial Technology Research Institute, a technology research and development institute in Taiwan.
Related Publication
Lien, Y.-H.; Peng, C.-C.; Chen, Y.-H. Adaptive Observer-Based Fault Detection and Fault-Tolerant Control of Quadrotors under Rotor Failure Conditions. Appl. Sci. 2020, 10, 3503. [Paper Link]
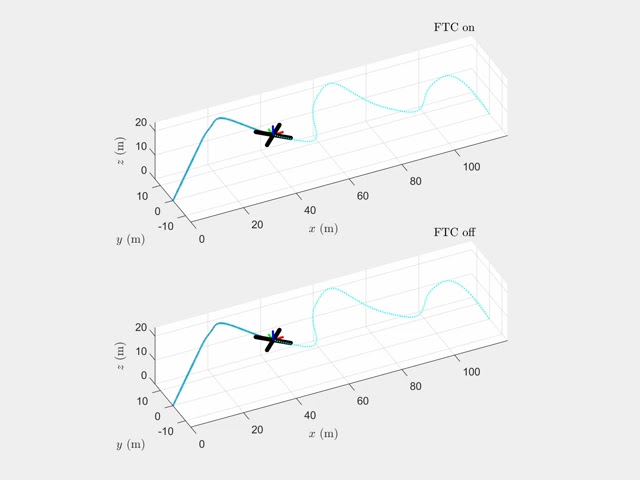
Conclusion
From the above video, we can find that the quadrotor is able to track desired trajectory when fault-tolerance control is engaged. The yaw control is sacrificed to maintain the controllability of x, y, and z directions. In this project, I was mainly charge of testing flight simulator, collecting data, and presenting our research results to collaborators every week.